




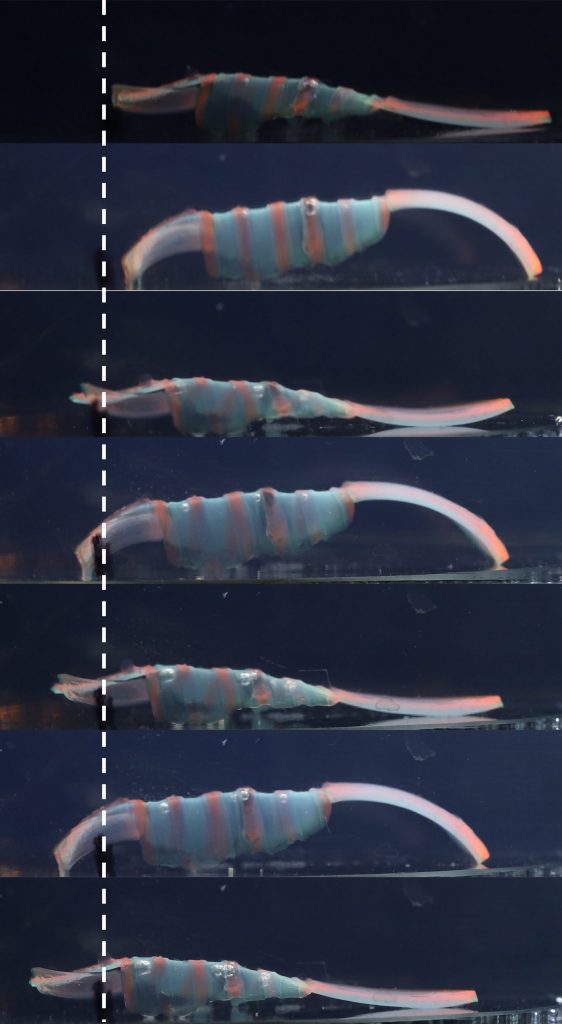
Using only temperature change and careful design, a new gelatinous crawling robot gives the field of soft robotics “a form of intelligence.” The work that was motivated by inchworms is described in Science Robotics today. According to senior author David Gracias, a professor of chemical and biomolecular engineering at Johns Hopkins University, “it seems very simplistic but this is an object moving without batteries, without wiring, without an external power supply of any kind—just on the swelling and shrinking of gel.” Our research demonstrates how gel shape, size, and patterning modulation can modify morphology to embody a form of locomotional intelligence.
A major barrier to developing robots that are perfect for advances in human biomedicine is the fact that most robots are composed of hard materials like metal and plastic. One of the most promising materials in the field of soft robotics is water-based gels, which have a gummy bear-like texture. Researchers have previously shown that temperature-responsive gels can be utilized to build intelligent structures.
Here, the Johns Hopkins researchers made a groundbreaking demonstration of how deliberately manipulating gel swelling and shrinkage may be used to propel robots forward and backward on flat surfaces, or to essentially have them crawl in specific directions with an undulating, wave-like motion. The gelbots, which were made for this project via 3D printing, could easily be mass produced. Gracias envisions a variety of real-world future uses, such as traveling through the human body on surfaces to deliver certain medications. They might also be underwater robots that patrol and keep an eye on the ocean’s surface.

The gelbots will be taught to crawl in reaction to changes in human biomarkers and biochemicals, according to Gracias. In addition, he wants to try various forms that are inspired by worms and other aquatic organisms, and he wants to add cameras and sensors to their bodies.
Reference: Science Robotics, Aishwarya Pantula et al, Untethered unidirectionally crawling gels driven by asymmetry in contact forces, Science Robotics (2022). DOI: 10.1126/scirobotics.add2903. www.science.org/doi/10.1126/scirobotics.add2903 ,Johns Hopkins University, techxplore.com